Insect Robotics: Locomotion
Robots have always played a large role in the Sci-fi genre but now they are slowly seeping into reality. The general idea is to use them to help with the more dangerous jobs, to go where people can’t and to just make life easier. But a problem encountered when designing robots is locomotion. How can we design them so that they can get from here to there with ease? Creating robots with multiple legs gives them an advantage over wheeled robots as they are able move over rougher terrain (Wang, Ding & Rovetta, 2009). Insects are one of the organisms that robotic engineers are drawing inspiration from for locomotion. The insect gait allows a steadier support for the body while being able to navigate over a larger variety of surfaces.
Insects have a cyclic gait which consists of two phases, the stance phase and the swing phase. The stance phase is the power stroke, it pushes the body forwards in the direction of travel while the leg remains on the ground. Three legs are used is this phase by forming a tripod with the front leg and the hind leg on one side of the body and the middle leg on the other side (Cruse et al., 2009). This formation is why this gait is known as the tripod gait (Figure 1). By forming a tripod as the insect moves, the body is supported, providing extra stability. The swing phase is the return stroke where the legs are lifted off the ground and moved to the next position to start again forming a new tripod (Buschges et al., 2008). The amount of time the legs are in the air is known as the swing duration while the amount of time they are in contact with the ground is the stance duration. These durations are equal at any given speed but vary with the walking speed (Cruse et al., 2009).
Insects have a cyclic gait which consists of two phases, the stance phase and the swing phase. The stance phase is the power stroke, it pushes the body forwards in the direction of travel while the leg remains on the ground. Three legs are used is this phase by forming a tripod with the front leg and the hind leg on one side of the body and the middle leg on the other side (Cruse et al., 2009). This formation is why this gait is known as the tripod gait (Figure 1). By forming a tripod as the insect moves, the body is supported, providing extra stability. The swing phase is the return stroke where the legs are lifted off the ground and moved to the next position to start again forming a new tripod (Buschges et al., 2008). The amount of time the legs are in the air is known as the swing duration while the amount of time they are in contact with the ground is the stance duration. These durations are equal at any given speed but vary with the walking speed (Cruse et al., 2009).
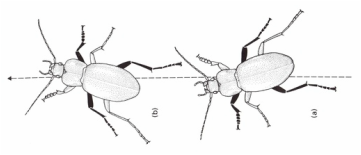
Figure 1: Tripod Gait
.
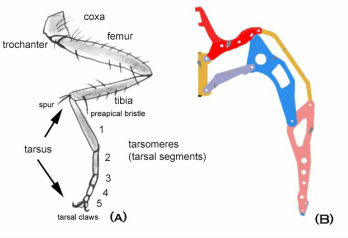
Figure 2: (a) insect leg, (b) nsect-based robotic leg design
Converting this knowledge to robots isn’t easy. Though the understanding of how insects use the tripod gait is relatively simple to understand, it is still a complex system. In order to move efficiently the joints and how they are used needs to be taken into account along with how the messages are relayed through the system. The insect leg has more than 5 segments (Figure 2a) which have to coordinate when stepping, involving over a dozen muscles for each phase (Buschges et al., 2008). There are three main joints which contribute to locomotion that have to be understood when constructing a hexapod robot. There is the thorax–coxal (waist) joint which allows for back and forth movements, the coxa-trochanteral joint which enables levitation and depression of the leg and the femur– tibia joint which lets the tibia flex and extend. The waist joint is the most actively used in walking due to the rotation of the leg from stance to swing phase and back again (Wang, Ding & Rovetta, 2009). The middle and hind legs extend the coxa–trochanteral and femur-tibia joints in near synchrony during walking but the extension is less pronounced in the middle legs. These extensions produce positive ground reaction forces providing propulsive movements in the hind legs while allowing for sweeping lateral movements in the middle legs. The front legs are much more complex, with rotation of the coxa occurring during the swing phase to move the leg forward past the thorax-coxal joint. This allows the front legs to move forward with more variability as well as generate braking forces if needed (Ritzmann, Quinn & Fischer, 2004). Most hexapod robot legs are constructed with these three joints (Figure 2b) though they don’t have as full a range of movements as their insect counterparts.
Knowing the outer construction of the insect leg is only the beginning. Understanding how leg movement in insects is controlled is also important. Motor neurons in the leg send signals to the thoracic ganglia in order to determine position, velocity and force of each muscle in the leg. Even then this is just oversimplification as not only do the motor neurons in insects separately control each individual leg but they also have separate control of each joint (Delcomyn, 1999). Akimoto, Watanabe & Yano (1999) created a robot that used the tripod gait by placing two DC motors in each leg that controlled each phase separately. A potentiometer was also used to detect the position and velocity of each leg much like found in the natural system. It was only very basic in design though and wasn’t the most energy efficient. Robots were still fairly slow during locomotion and were nowhere near reaching the higher speeds that insects could reach (Delcomyn, 1999).
With understanding how each leg work as an individual to contribute to locomotion, systems need to be constructed that allow the robot to move with coordination of the legs. There are various methods which are employed to do so. The first method is centralized control. This is where a central computer controls all joint motion at a set speed. This method has flaws in that one speed is not always ideal for all situations. Another method is using load feedback mechanisms. These vary with the engineer and design of the robot but they generally allow the computer to adjust the legs and speed with the feedback it receives. This method requires an understanding of the motor neurons (Espenschied, 1993). It isn’t always necessary to use a computer to control movement as human input can be used instead but for most systems autonomous control is usually desired.
As more is understood in the neural control of locomotion, it is still difficult to apply to robotics. Artificial actuators are nowhere near as efficient as actual muscles are and an incomplete understanding of neural circuits makes it harder to apply to a robot, having to account for the fact that it is a different scale to an insect as well as being made of different materials (Ritzmann, Quinn & Fischer, 2004). With what we have available, attempts are being made to make parts that are more energy efficient, with higher flexibility or just lighter to carry.
So now we have a basic understanding of how the legs work individually and as a whole but in nature there are sometimes incidents where legs may be lost. With the loss of a leg, the balance is shifted and the insect has to adjust for this. They are surprisingly good at adapting to this as has been found in amputation studies. For example, if the front leg is lost then the middle leg will reach further forward in order to compensate. Steps also become slower and slightly out of phase as the legs must bear the weight for a longer period of time. However, if two legs are lost (one from either side of the body) then the insect adapts a tetrapod gait instead (Kar, Issac & Jayarajan, 2003). By giving an insect an artificial limb so that it can sense load in the feedback loop, it will revert the gait back to the normal tripod gait (Delcomyn, 1999). Getting a robot to adapt in this way would be a much more difficult task though. It would be relatively easy to replace the leg but if the robot was harder to reach such as a lunar robot then being able to adapt in case a leg becomes damaged or lost could be extremely useful. Not much research has gone into this though.
With understanding how each leg work as an individual to contribute to locomotion, systems need to be constructed that allow the robot to move with coordination of the legs. There are various methods which are employed to do so. The first method is centralized control. This is where a central computer controls all joint motion at a set speed. This method has flaws in that one speed is not always ideal for all situations. Another method is using load feedback mechanisms. These vary with the engineer and design of the robot but they generally allow the computer to adjust the legs and speed with the feedback it receives. This method requires an understanding of the motor neurons (Espenschied, 1993). It isn’t always necessary to use a computer to control movement as human input can be used instead but for most systems autonomous control is usually desired.
As more is understood in the neural control of locomotion, it is still difficult to apply to robotics. Artificial actuators are nowhere near as efficient as actual muscles are and an incomplete understanding of neural circuits makes it harder to apply to a robot, having to account for the fact that it is a different scale to an insect as well as being made of different materials (Ritzmann, Quinn & Fischer, 2004). With what we have available, attempts are being made to make parts that are more energy efficient, with higher flexibility or just lighter to carry.
So now we have a basic understanding of how the legs work individually and as a whole but in nature there are sometimes incidents where legs may be lost. With the loss of a leg, the balance is shifted and the insect has to adjust for this. They are surprisingly good at adapting to this as has been found in amputation studies. For example, if the front leg is lost then the middle leg will reach further forward in order to compensate. Steps also become slower and slightly out of phase as the legs must bear the weight for a longer period of time. However, if two legs are lost (one from either side of the body) then the insect adapts a tetrapod gait instead (Kar, Issac & Jayarajan, 2003). By giving an insect an artificial limb so that it can sense load in the feedback loop, it will revert the gait back to the normal tripod gait (Delcomyn, 1999). Getting a robot to adapt in this way would be a much more difficult task though. It would be relatively easy to replace the leg but if the robot was harder to reach such as a lunar robot then being able to adapt in case a leg becomes damaged or lost could be extremely useful. Not much research has gone into this though.
.
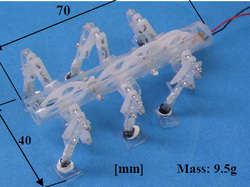
Figure 3: Robot designed by Suzuki et al.
Certain insects also have special adaptations to their legs for different roles they fill. Some have articulated spines for defense or fringes of long, slender hairs for swimming. Others, like ants, have ventral pads to assist in surface adhesion (Gullan & Cranston, 2005). Ants have an organ known as the arolium which secretes adhesive liquid that allow them to walk up walls. Suzuki et al. (2009) used this knowledge to try creating a small robot with the ability to walk up vertical surfaces due to the potential for mobile surveillance or cleaning of hard to reach places. Through the construction of adhesive pads, which were attached to the robots feet, the robot was able to walk on vertical surface and even upside on a glass surface (Figure 3). With larger sized robots this would be a harder feat to achieve but it is just another example of how we draw inspiration from nature.
